慧鲤增强现实平台为亚洲最大的元宇宙赋能平台之一,目前,平台已广泛应用在智能手机、城市文旅、商业地产等众多场景,为行业客户提供虚实融合应用和平台技术服务。
SLAM算法是增强现实应用的核心基础算法,对于以空间为基础的各种AR应用,SLAM算法的性能对用户体验至关重要。
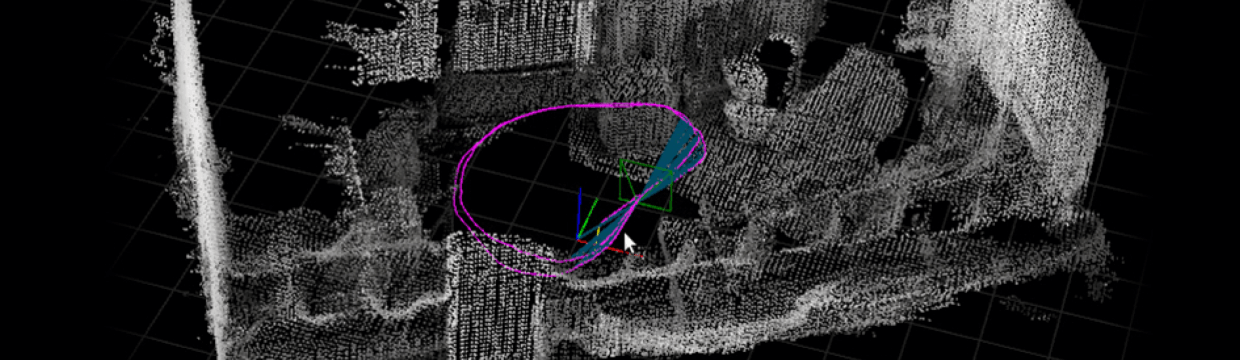
慧鲤SLAM算法能够基于移动端多种传感器信息,实时跟踪设备的三维空间位置,实现对当前设备精准的空间定位,同时,可对周围环境做3D感知(如点云恢复、平面重建、网格重建等),构建场景的三维几何地图,支持移动平台的实时定位和虚拟物体植入,达到完美的“虚实融合”效果。
慧鲤SLAM支持手机、AR眼镜、全景相机等多种不同终端,同时支持Android、iOS等移动端操作系统,以及Web等轻量级平台,在终端和平台适配等方面业界领先,解决了AR应用使用门槛高的痛点。
支持Android 8以上、IOS 10以上和微信小程序等平台
1. 支持6DoF跟踪、重定位、回路闭合、多平面检测等多种功能;
2. 支持单目+IMU、双目+IMU、单目+ToF+IMU、单目+重力计等多种传感器。
通过自主研发的视觉惯导 SLAM 系统,能够实时跟踪设备的三维空间位姿。同时,构建场景的三维几何地图,支持移动平台的实时位姿跟踪和虚拟物体植入,达到完美的“虚实融合”效果。
基于业界领先的多传感器融合和优化算法,以视觉信息为主,融合了IMU、深度传感器(如ToF)等多种不同传感器信息
可同时支持APP、Web H5、微信小程序、支付宝小程序等平台,保证了算法的高精度、强鲁棒性和机型适配能力