慧鲤增强现实平台为亚洲最大的元宇宙赋能平台之一,目前,平台已广泛应用在智能手机、城市文旅、商业地产等众多场景,为行业客户提供虚实融合应用和平台技术服务。
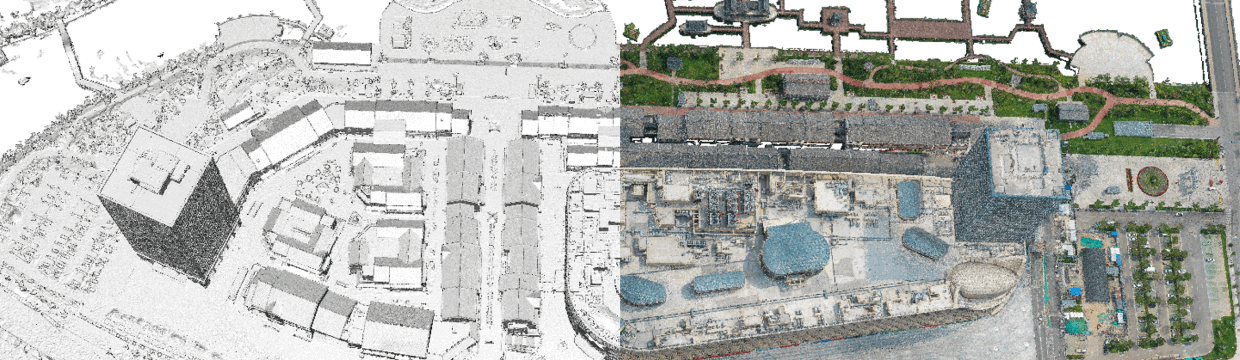
慧鲤高精度地图算法基于全景相机、无人机、数码相机采集的图像以及GPS蓝牙等传感器数据,利用离线采集的视频或图片提取场景中的视觉特征并进行匹配,从而恢复图片的相机位置和场景的稀疏三维点云,构建环境的高精度三维地图,包含稀疏的地标点、稠密点云、语义等信息,可以用来正确处理虚拟物体和真实场景的遮挡关系以及碰撞,实现高品质的增强现实效果。
英伟达、华为、海光、寒武纪GPU
1.慧鲤高精度地图算法数据采集仅依赖相机、GPS、蓝牙等传感器,使用方便且成本很低;
2.可在4小时内完成2万平场景的建图,效率较高,每1万平场景内误差小于10cm。
通过运动恢复结构技术与多视图立体几何技术构建场景三维地图。

利用图像特征分布特性以及多传感器的信息构建鲁棒的数据关联

基于多视图几何算法和非线性优化方法从图像的匹配关系中恢复出图像设备位姿以及环境的三维结构