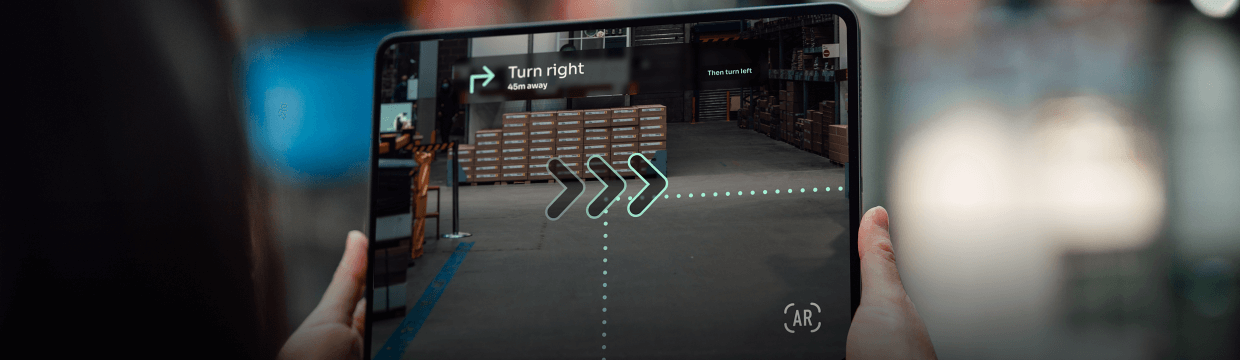
慧鲤增强现实平台为亚洲最大的元宇宙赋能平台之一,目前,平台已广泛应用在智能手机、城市文旅、商业地产等众多场景,为行业客户提供虚实融合应用和平台技术服务。
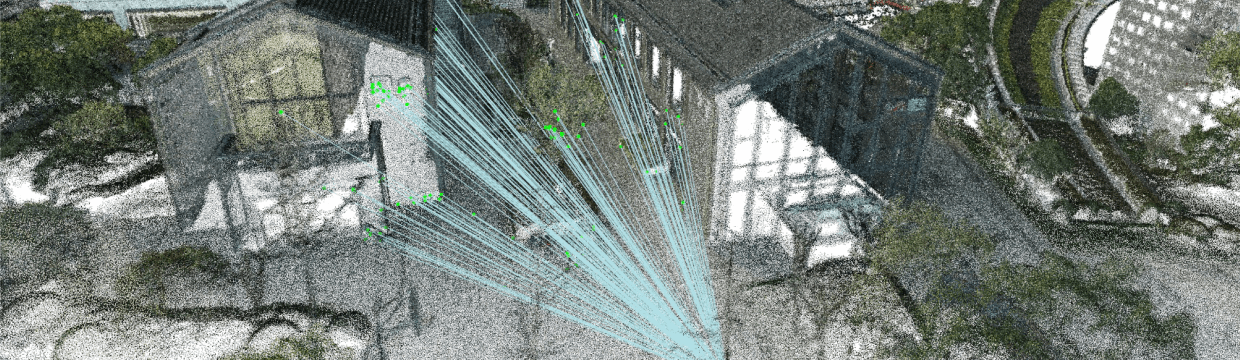
慧鲤视觉定位算法基于场景的高精度地图,主要利用终端拍摄的单帧图像恢复相机的位置和姿态,也可以利用GPS和蓝牙进行辅助定位。终端可以将用户拍摄的图像发送到云端,云端将图像中抽取的特征与地图中的特征进行匹配,并对用户使用设备进行全局的6自由度的位置和姿态计算,终端收到云端反馈回来的定位结果和相关信息,将其耦合到SLAM优化目标里,可以实现在大尺度场景下的长时间高精定位与跟踪。
支持Android 8以上、IOS 10以上和微信小程序等平台
慧鲤视觉定位已落地众多复杂场景,如商超、停车场、展览馆、博物馆、机场、高铁站、景区等,具有速度快、并发性能高、精度高的优势,单张图像定位算法耗时约50ms,单张T4GPU上QPS达90,75%以上的定位结果误差为厘米级。
基于深度学习和多视几何技术实现基于图像的定位。
提取描述图像的全局特征以及局部特征
利用神经网络和几何一致性实现高精度的特征匹配