- Tetras Large Model
-
Core Competencies
Core Competencies
-
Intelligent Image Solutions Integrating AI Sensor, AI ISP, and AI Algorithm
-
-
-
-
Products & Services
Products & Services
-
TetrasMobile AI Sensor Hardware Solution
-
TetrasMobile Intelligent Image SDK Solution
-
TetrasMobile AI ISP Chip
-
TetrasMobile FaceID
-
TetrasMobileSmart Video
-
TetrasMobile Basic Perception Product
-
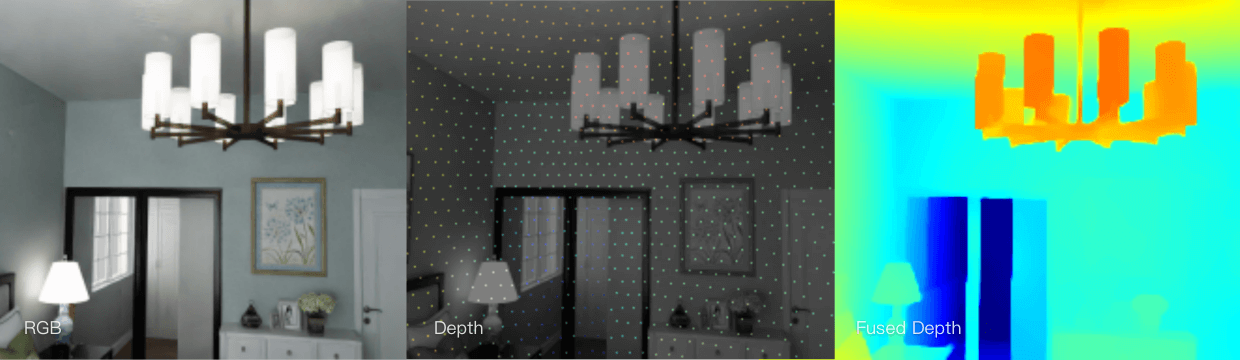
TetrasMobile 3D Vision
-
TetrasMobile Augmented Reality Platform
-
- News & Events
- Contact Us